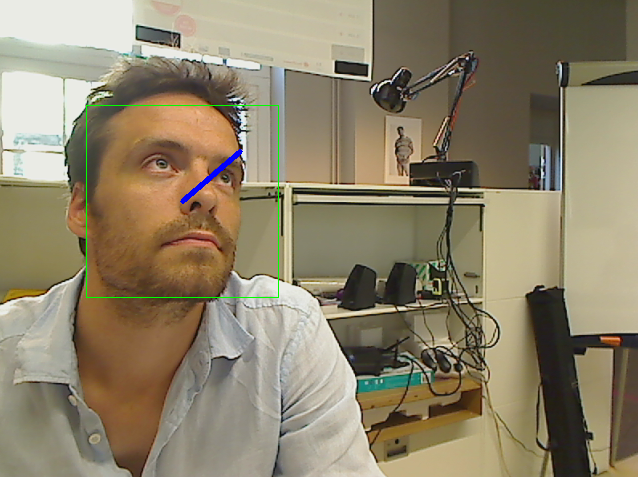
Gaze Analysis¶
What are people in front of my object looking at?
Getting Started¶
Using the Python SDK:
# -*- coding: utf-8 -*-
import angus.client
from pprint import pprint
conn = angus.client.connect()
service = conn.services.get_service('gaze_analysis', version=1)
job = service.process({'image': open('./macgyver.jpg', 'rb')})
pprint(job.result)
Input¶
The API takes a stream of 2d still images as input, of format jpg or png, without constraints on resolution.
Note however that the bigger the resolution, the longer the API will take to process and give a result.
The function process() takes a dictionary as input formatted as follows:
{'image' : file}
image: a pythonFile Objectas returned for example byopen()or aStringIObuffer.
Output¶
Events will be pushed to your client following that format:
{
"input_size" : [480, 640],
"nb_faces" : 1,
"faces" : [
{
"roi" : [250, 142, 232, 232],
"roi_confidence" : 0.89,
"eye_left" : [123, 253],
"eye_right" : [345, 253],
"nose" : [200, 320],
"head_yaw" : 0.03,
"head_pitch" : 0.23,
"head_roll" : 0.14,
"gaze_yaw" : 0.05,
"gaze_pitch" : 0.12
}
]
}
input_size: width and height of the input image in pixels (to be used as reference toroioutput.nb_faces: number of faces detected in the given imageroi: contains[pt.x, pt.y, width, height]where pt is the upper left point of the rectangle outlining the detected face.roi_confidence: an estimate of the probability that a real face is indeed located at the givenroi.head_yaw,head_pitch,head_roll: head pose orientation in radian.gaze_yaw,gaze_pitch: gaze (eyes) orientation in radian.eye_left,eye_right,nose: the coordinate of the eyes and noze in the given image.
Code Sample¶
requirements: opencv2, opencv2 python bindings
This code sample retrieves the stream of a web cam and display in a GUI the result of the face_detection service.
# -*- coding: utf-8 -*-
import StringIO
from math import cos, sin
import cv2
import numpy as np
import angus.client
def main(stream_index):
camera = cv2.VideoCapture(0)
camera.set(cv2.cv.CV_CAP_PROP_FRAME_WIDTH, 640);
camera.set(cv2.cv.CV_CAP_PROP_FRAME_HEIGHT, 480);
camera.set(cv2.cv.CV_CAP_PROP_FPS, 10)
if not camera.isOpened():
print("Cannot open stream of index {}".format(stream_index))
exit(1)
print("Input stream is of resolution: {} x {}".format(camera.get(3), camera.get(4)))
conn = angus.client.connect()
service = conn.services.get_service('gaze_analysis', 1)
service.enable_session()
while camera.isOpened():
ret, frame = camera.read()
if not ret:
break
### angus.ai computer vision services require gray images right now.
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
ret, buff = cv2.imencode(".jpg", gray, [cv2.IMWRITE_JPEG_QUALITY, 80])
buff = StringIO.StringIO(np.array(buff).tostring())
job = service.process({"image": buff})
res = job.result
for face in res['faces']:
x, y, dx, dy = map(int, face['roi'])
nose = face['nose']
nose = (nose[0], nose[1])
eyel = face['eye_left']
eyel = (eyel[0], eyel[1])
eyer = face['eye_right']
eyer = (eyer[0], eyer[1])
psi = face['head_roll']
theta = - face['head_yaw']
phi = face['head_pitch']
### head orientation
length = 150
xvec = int(length*(sin(phi)*sin(psi) - cos(phi)*sin(theta)*cos(psi)))
yvec = int(- length*(sin(phi)*cos(psi) - cos(phi)*sin(theta)*sin(psi)))
cv2.line(frame, nose, (nose[0]+xvec, nose[1]+yvec), (0, 140, 255), 3)
psi = 0
theta = - face['gaze_yaw']
phi = face['gaze_pitch']
### gaze orientation
length = 150
xvec = int(length*(sin(phi)*sin(psi) - cos(phi)*sin(theta)*cos(psi)))
yvec = int(- length*(sin(phi)*cos(psi) - cos(phi)*sin(theta)*sin(psi)))
cv2.line(frame, eyel, (eyel[0]+xvec, eyel[1]+yvec), (0, 140, 0), 3)
xvec = int(length*(sin(phi)*sin(psi) - cos(phi)*sin(theta)*cos(psi)))
yvec = int(- length*(sin(phi)*cos(psi) - cos(phi)*sin(theta)*sin(psi)))
cv2.line(frame, eyer, (eyer[0]+xvec, eyer[1]+yvec), (0, 140, 0), 3)
cv2.imshow('original', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
### Disabling session on the server
service.disable_session()
camera.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
### Web cam index might be different from 0 on your setup.
### To grab a given video file instead of the host computer cam, try:
### main("/path/to/myvideo.avi")
main(0)